TF Mini LiDAR(ToF) Laser Range Sensor
Product Code: DFR SEN0259
 Laser Range Sensor")
 Laser Range Sensor")
 Laser Range Sensor")
 Laser Range Sensor")
 Laser Range Sensor")
 Laser Range Sensor")

INTRODUCTION
The TF Mini LiDAR is an unidirectional laser range finder based upon time-of-flight (ToF) technology. It consists of special optical and electronic devices, which integrates adaptive algorithm for indoor and outdoor application environment. It has tiny body and high performance in distance measurement.
The laser sensor can be used as a distance-measuring tool to detect the distance from it to obstacles. It can also be used as an eye of a robot; it provides distance information for robotic safe avoidance and route selection. It supports for system automation in a variety of machine control scenarios. Because of its small size, light weight and low power consumption, it is also suitable for altitude hold quad-copters and terrain following.

Figure 1: TF Mini Optical Stimulation Light Path
TF Mini's maximum detection distance is 12 meters. TF Mini also supports 100Hz sampling resolution, within 6 meters, its accuracy is within 4cm, 6~12 meters, accuracy within 6 cm. FOV of 2.3 degree. Its anti-interference is strong, and can work in outdoor light; the overall weight is 4.7g.
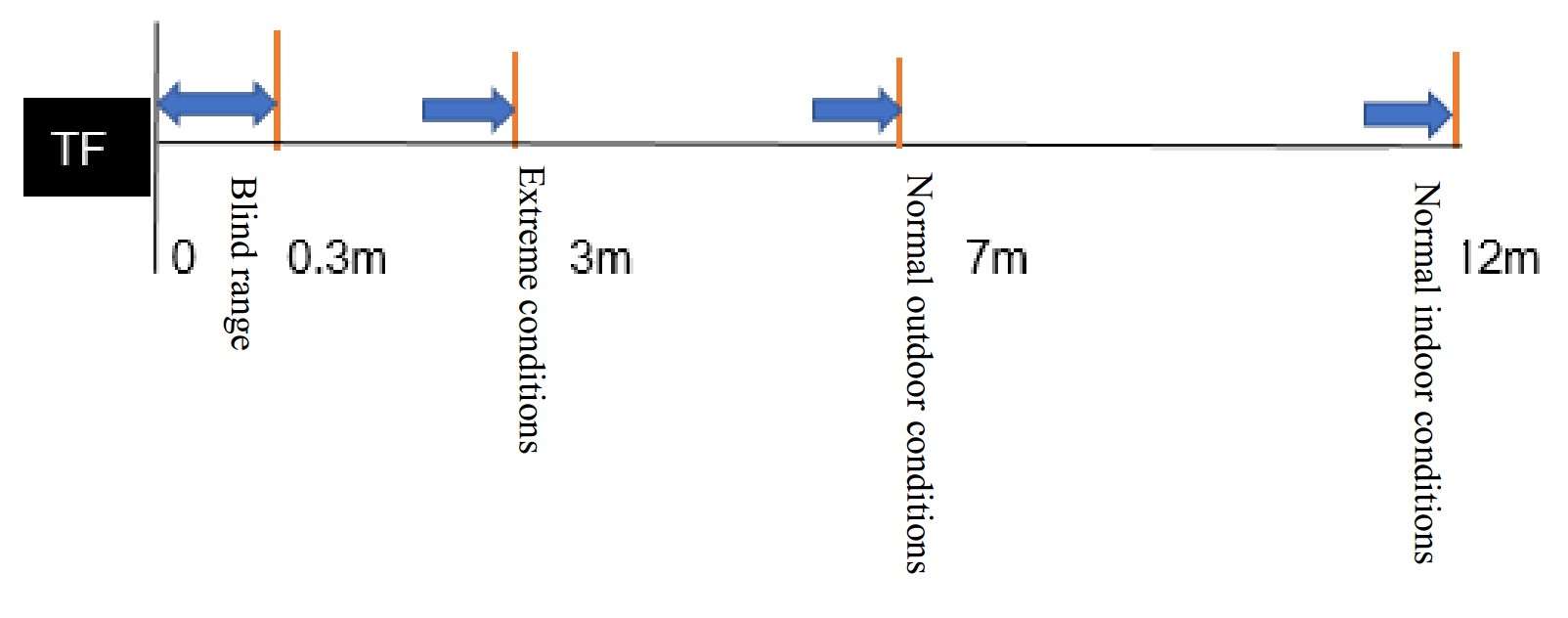
Figure 2 : Measurement range schematic diagram
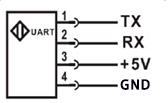

Figure 3: Arduino TF mini Connection Diagram
distance meter and obstacle detector with a mini td LiDAR (ToF) Laser and arduino
Getting Started with LIDAR
NOTE:- The product may be invalid when probing objects with high reflectivity, such as mirrors and smooth tiles.
- When there are transparent objects, such as glass and water, between the product and the tested object, it may become invalid.
- Do not touch the circuit board with your bare hands. If necessary, please wear an electrostatic wristband or antistatic gloves.
FEATURES
- Unidirectional laser range finder
- Maximum Detection Range: 12m
- Perform excellent in distance measurement, high precision.
- Support 100Hz sampling resolution, responsive.
- Small size and low power consumption.
APPLICATIONS
- Machine control and safety measurement systems
- Laser range finder robot
- Altitude hold quad-copters and terrain following
SPECIFICATION
- Voltage Range: 4.5V-6V
- Communication Interface: UART (TTL)
- Working Range: 0.3m-12m (indoor)
- The Maximum Range of Reflectivity 10%:5m
- Average Power: 0.6W
- Acceptance Angle: 2.3°
- Minimum Resolution: 5mm
- Refresh Frequency: 100Hz
- Ranging Accuracy: 1% (<6m), 2% (6 ~ 12m)
- Ranging Unit: mm
- Band: 850nm
- Size: 1.65in x0.59in x0.63in / 42mm x15mm x16mm
- Operating Temperature: 0°C ~ 60°C
- Storage Temperature: -20°C~75°C
- Anti-light Environment: 70Klux
DOCUMENTS
SHIPPING LIST
- TF Mini LiDAR(12m) x1
- TF Mini LiDAR(12m) A wire x1
- TF Mini LiDAR(12m) B wire x1
Write a review
Your Name:
Your Review:
Note: HTML is not translated!
Rating:
Bad
Good
Enter the code in the box below:
-
 ₹949.00
₹949.00



© 2026, MG Automation Technologies. Powered by MG Super LABS.Find us on Google+
Designed with by Ish Gupta