Magnetic rotary click
Product Code: MIKROE-3275





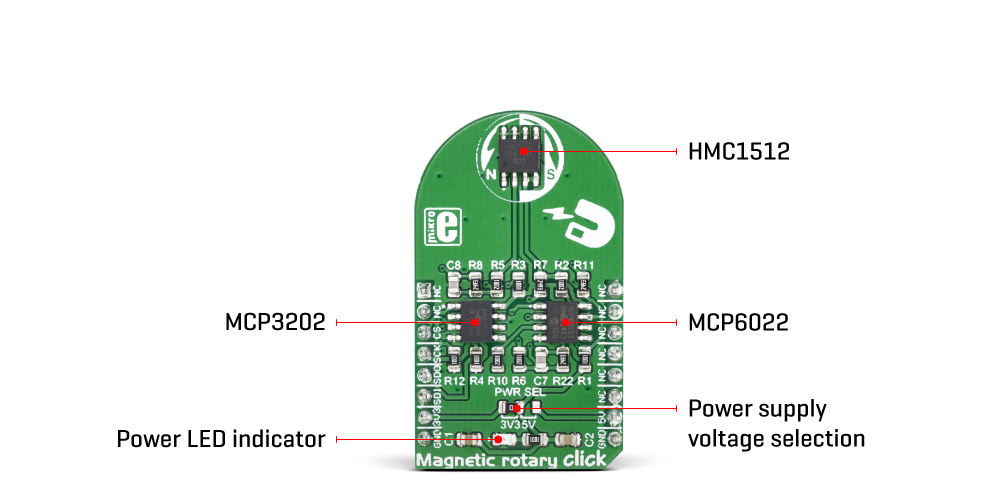
The HMC1512 sensor IC produces a highly linear voltage output signal in respect to the magnetic field angle, available directly from two bridges via differential output pins. To allow simplified usage, the Magnetic rotary click features an additional dual A/D converter, making it a complete solution for the rapid development of various contactless position and direction sensing applications, HMI interfaces, precision measurement applications, proximity detection applications, contactless rotary applications, etc.
How does it work?
The main component of Magnetic rotary click is the HMC1512, a magnetic displacement sensor, from Honeywell. The key feature of the HMC1512 IC is the high accuracy of the magnetic field sensing. Unlike most of the magnetic sensors on the market which rely on the Hall-effect, the integrated sensors of the HMC1512 IC are produced using the Honeywell proprietary Anisotropic Magneto-Resistive (AMR) technology, which yields an absolute magnetic field position sensing with the angular error of only 0.05° in the range of ±90°. The magneto-resistive sensing elements form a saturated-mode Wheatstone bridge, positioned in the XZ plane (parallel with the surface of the IC). The HMC1512 contains two such integrated bridges, bridge A, and bridge B. These bridges are positioned at the middle of the IC casing, which is the optimal position for rotary applications. One bridge is physically rotated by 45° from the other, allowing the HMC1512 IC to cover the full range of ±90° (2x45°), maintaining its sensing accuracy. The IC outputs an analog differential voltage with respect to the angle of the magnetic field.
The voltage from the selected mikroBUS™ power rail is directly applied to the internal Wheatstone bridge of the HMC1512. By construction, in the absence of the magnetic field, its outputs will be set at half the supply voltage (with the small offset of 3mV/V typically). If there is a magnetic field positioned at 0° in respect to one of the bridges, it will cause no disbalance of the magneto-resistive elements for that bridge. However, in the other bridge, the same magnetic field will cause it to reach its peak output value, since that bridge is rotated by 45°. The voltage change on the outputs can be then calculated using the following formulas:
Bridge A: ΔV= VS· S · sin(2Θ)
The second bridge which is physically rotated by 45°, will have its output defined by this formula:
Bridge B: ΔV= -VS· S · cos(2Θ)
Where:
- ΔV is a differential output voltage
- VS is the power supply voltage (3.3V or 5V)
- S is the material constant (12mV/V)
- Θ is the angle of the magnetic field
The datasheet of the HMC1512 offers a more detailed explanation, along with some use cases. However, Magnetic rotary click is supported by the mikroSDK library, which offers easy to use functions. All necessary calculations are encapsulated in these functions, allowing rapid application development. The included example application can be used as a reference and a starting point for a custom design.
The outputs of the Wheatstone bridges are routed to the dual operational amplifier, which serves as the buffer for the A/D converter. As a dual operational amplifier, the MCP6022 from Microchip is used. This op-amp is biased to half the power supply voltage and has a gain of 25. Two buffered signals are then used as inputs for each channel of the A/D converter.
Magnetic rotary click uses the MCP3202, a two-channel, 12-bit A/D converter (ADC) with SPI Interface, by Microchip. This ADC has a high resolution which can be used even for more demanding applications. At 0°, the ADC will output half of its full-scale (FS) value, and it will swing towards 0 if the sign of the orientation of the magnetic field is positioned towards the negative direction, and 4095 if the orientation of the magnetic field is positioned towards the positive direction. Each bridge output is routed to a separate ADC input, so it can be independently converted. The MCP3202 uses the power supply as the reference voltage, allowing ADC conversion within the range of the input signal. Converted output values can be read via the SPI interface, routed to the mikroBUS™ SPI pins for easy interfacing with a vast number of different microcontrollers (MCUs).
The power supply voltage for the whole circuit can be selected by switching the SMD jumper, labeled as PWR SEL. It offers a choice of the power supply voltage between 3.3V and 5V, available from the mikroBUS™.
Specifications
| Type | Magnetometer |
| Applications | Magnetic linear click can be used for development of various contactless position and direction sensing applications, HMI interfaces, precision measurement applications, proximity detection applications, contactless rotary applications, etc. |
| On-board modules | HMC1512, a magnetic displacement sensor, from Honeywell; MCP6022, a dual, rai-to-rail operational amplifier; MCP3202, a dual, 12-bit A/D converter with SPI interface, by Microchip |
| Key Features | A very high precision is achieved by implementing the proprietary Anisotropic magneto-resistive (AMR) technology from Honeywell, absolute sensing of the magnetic field direction, very compact size, two internal Wheatstone bridges expand the sensing range, 12-bit dual ADC on-board, etc. |
| Interface | SPI |
| Input Voltage | 3.3V or 5V |
| Compatibility | mikroBUS |
| Click board size | M (42.9 x 25.4 mm) |
Pinout diagram
This table shows how the pinout on Magnetic rotary click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | NC | ||
| NC | 2 | RST | INT | 15 | NC | ||
| SPI Chip Select | CS | 3 | CS | RX | 14 | NC | |
| SPI Clock | SCK | 4 | SCK | TX | 13 | NC | |
| SPI Data OUT | SDO | 5 | MISO | SCL | 12 | NC | |
| SPI Data IN | SDI | 6 | MOSI | SDA | 11 | NC | |
| Power supply | 3V3 | 7 | 3.3V | 5V | 10 | 5V | Power supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
Onboard Jumpers and Settings
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED indicator |
| J1 | PWR SEL | Left | Power supply voltage selection: left position 3.3V, right position 5V |
Software support
We provide a library for the NB IoT click on our LibStock page, as well as a demo application (example), developed using MikroElektronika compilers. The demo can run on all the main MikroElektronika development boards.
Library Description
The library performs a magnetic field angle measurement and calculates angle value to degrees. The library also performs the all necessary settings for the AD conversion, for example channel selection and mode setting. For more details check documentation.
Key functions:
uint16_t magnrotary_readADC( uint8_t cmndByte )- Function returns a 12bit result of AD conversion.
uint16_t magnrotary_outVoltADC( uint8_t cmdByte, uint16_t pwrVolt )- Function returns ADC voltage value calculated to millivolts, depending on the VDD (power) voltage selection.
double magnrotary_getFieldAngle( uint8_t cmdByte )- Function returns a magnetic field angle calculated to degrees, in the range from -90 to 90 degrees.
Examples description
The application is composed of the three sections :
- System Initialization - Initializes peripherals and pins.
- Application Initialization - Initializes SPI interface for communication with the device.
- Application Task - (code snippet) - Reads a magnetic field angle calculated to degrees for channel A in Single-Ended Mode and logs results on uart terminal. Repeats operation every 300 milliseconds. Note : The angle can be measured in the range from -90 to 90 degrees.
void applicationTask()
{
magnAngle = magnrotary_getFieldAngle( _MAGNROTARY_CHA_POS_GND_NEG | _MAGNROTARY_MSB_ZEROS_ORDER );
FloatToStr( magnAngle, text );
floatCut();
mikrobus_logWrite( "Angle is : ", _LOG_TEXT );
mikrobus_logWrite( text, _LOG_TEXT );
mikrobus_logWrite( logDeg, _LOG_LINE );
Delay_ms( 300 );
}
Additional Functions :
void floatCut()- - Makes float value to be rounded on two decimal places.void plotAngle()- Sends results of angle on serial plotter.
The full application code, and ready to use projects can be found on our LibStock page.
Other mikroE Libraries used in the example:
ConversionSPIUART
Additional notes and information
Depending on the development board you are using, you may need USB UART click, USB UART 2 click or RS232 click to connect to your PC, for development systems with no UART to USB interface available on the board. The terminal available in all MikroElektronika compilers, or any other terminal application of your choice, can be used to read the message.
mikroSDK
This click board is supported with mikroSDK - MikroElektronika Software Development Kit. To ensure proper operation of mikroSDK compliant click board demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
Downloads
mikroBUS™ Standard specificationMagnetic rotary click Libstock
Magnetic rotary click 2D and 3D files
Write a review
Your Name:
Your Review:
Note: HTML is not translated!
Rating:
Bad
Good
Enter the code in the box below:
-
 ₹8,299.00
₹8,299.00





© 2026, MG Automation Technologies. Powered by MG Super LABS.Find us on Google+
Designed with by Ish Gupta